CUDA学习笔记(一) - Fla
CUDA学习笔记(一)
CUDA编程中,习惯称CPU为Host,GPU为Device。编程中最开始接触的东西恐怕是并行架构,诸如Grid、Block的区别会让人一头雾水,我所看的书上所讲述的内容比较抽象,对这些概念的内容没有细讲,于是在这里作一个整理。
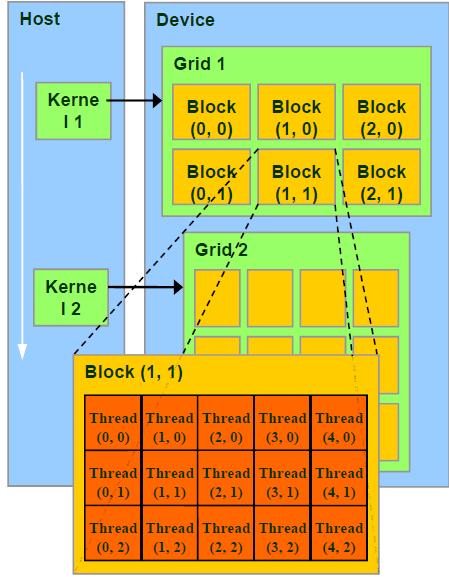
Grid、Block和Thread的关系
Thread :并行运算的基本单位(轻量级的线程)
Block :由相互合作的一组线程组成。一个block中的thread可以彼此同步,快速交换数据,最多可以同时512个线程。
Grid :一组Block,有共享全局内存
Kernel :在GPU上执行的程序,一个Kernel对应一个Grid。
其结构如下图所示:
/* 另外:Block和Thread都有各自的ID,记作blockIdx(1D,2D),threadIdx(1D,2D,3D) Block和Thread还有Dim,即blockDim与threadDim. 他们都有三个分量x,y,z 线程同步:void __syncthreads(); 可以同步一个Block内的所有线程 总结来说,每个 thread 都有自己的一份 register 和 local memory 的空间。 一组thread构成一个 block,这些 thread 则共享有一份shared memory。 此外,所有的 thread(包括不同 block 的 thread)都共享一份 global memory、constant memory、和 texture memory。 不同的 grid 则有各自的 global memory、constant memory 和 texture memory。 */
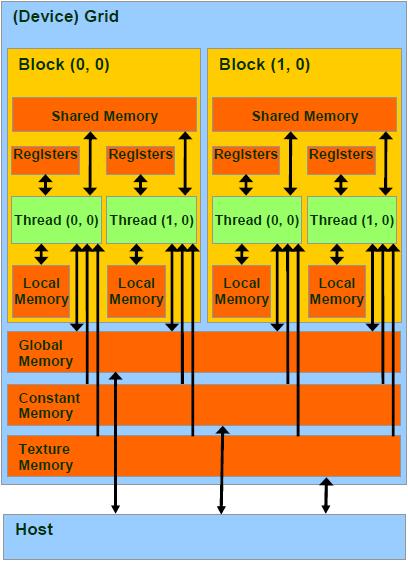
per-thread register 1 cycle per-thread local memory slow per-block shared memory 1 cycle per-grid global memory 500 cycle,not cached!! constant and texture memories 500 cycle, but cached and read-only 分配内存:cudaMalloc,cudaFree,它们分配的是global memory Hose-Device数据交换:cudaMemcpy
__device__ // GPU的global memory空间,grid中所有线程可访问 __constant__ // GPU的constant memory空间,grid中所有线程可访问 __shared__ // GPU上的thread block空间,block中所有线程可访问 local // 位于SM内,仅本thread可访问 // 在编程中,可以在变量名前面加上这些前缀以区分。
// 内建矢量类型: int1,int2,int3,int4,float1,float2, float3,float4 ... // 纹理类型: texture<Type, Dim, ReadMode>texRef; // 内建dim3类型:定义grid和block的组织方法。例如: dim3 dimGrid(2, 2); dim3 dimBlock(4, 2, 2); // CUDA函数CPU端调用方法 kernelFoo<<<dimGrid, dimBlock>>>(argument);
__device__ // 执行于Device,仅能从Device调用。限制,不能用&取地址;不支持递归;不支持static variable;不支持可变长度参数 __global__ // void: 执行于Device,仅能从Host调用。此类函数必须返回void __host__ // 执行于Host,仅能从Host调用,是函数的默认类型 // 在执行kernel函数时,必须提供execution configuration,即<<<....>>>的部分。 // 例如: __global__ void KernelFunc(...); dim3 DimGrid(100, 50); // 5000 thread blocks dim3 DimBlock(4, 8, 8); // 256 threads per block size_t SharedMemBytes = 64; // 64 bytes of shared memory KernelFunc<<< DimGrid, DimBlock, SharedMemBytes >>>(...);
CUDA包含一些数学函数,如sin,pow等。每一个函数包含有两个版本, 例如正弦函数sin,一个普通版本sin,另一个不精确但速度极快的__sin版本。
/* gridDim, blockIdx, blockDim, threadIdx, wrapsize. 这些内置变量不允许赋值的 */
/* 目前CUDA仅能良好的支持C,在编写含有CUDA代码的程序时, 首先要导入头文件cuda_runtime_api.h。文件名后缀为.cu,使用nvcc编译器编译。 目前最新的CUDA版本为5.0,可以在官方网站下载最新的工具包,网址为: https://developer.nvidia.com/cuda-downloads 该工具包内包含了ToolKit、样例等,安装起来比原先的版本也方便了很多。 */
1 GPU硬件 // i GPU一个最小单元称为Streaming Processor(SP),全流水线单事件无序微处理器, 包含两个ALU和一个FPU,多组寄存器文件(register file,很多寄存器的组合), 这个SP没有cache。事实上,现代GPU就是一组SP的array,即SPA。 每一个SP执行一个thread // ii 多个SP组成Streaming Multiprocessor(SM)。 每一个SM执行一个block。每个SM包含8个SP; 2个special function unit(SFU): 这里面有4个FPU可以进行超越函数和插值计算 MultiThreading Issue Unit:分发线程指令 具有指令和常量缓存。 包含shared memory // iii Texture Processor Cluster(TPC) :包含某些其他单元的一组SM 2 Single-Program Multiple-Data (SPMD)模型 // i CPU以顺序结构执行代码, GPU以threads blocks组织并发执行的代码,即无数个threads同时执行 // ii 回顾一下CUDA的概念: 一个kernel程序执行在一个grid of threads blocks之中 一个threads block是一批相互合作的threads: 可以用过__syncthreads同步; 通过shared memory共享变量,不同block的不能同步。 // iii Threads block声明: 可以包含有1到512个并发线程,具有唯一的blockID,可以是1,2,3D 同一个block中的线程执行同一个程序,不同的操作数,可以同步,每个线程具有唯一的ID 3 线程硬件原理 // i GPU通过Global block scheduler来调度block, 根据硬件架构分配block到某一个SM。 每个SM最多分配8个block,每个SM最多可接受768个thread (可以是一个block包含512个thread, 也可以是3个block每个包含256个thread(3*256=768!))。 同一个SM上面的block的尺寸必须相同。每个线程的调度与ID由该SM管理。 // ii SM满负载工作效率最高!考虑某个Block,其尺寸可以为8*8,16*16,32*32 8*8:每个block有64个线程, 由于每个SM最多处理768个线程,因此需要768/64=12个block。 但是由于SM最多8个block,因此一个SM实际执行的线程为8*64=512个线程。 16*16:每个block有256个线程,SM可以同时接受三个block,3*256=768,满负载 32*32:每个block有1024个线程,SM无法处理! // iii Block是独立执行的,每个Block内的threads是可协同的。 // iv 每个线程由SM中的一个SP执行。 当然,由于SM中仅有8个SP,768个线程是以warp为单位执行的, 每个warp包含32个线程,这是基于线程指令的流水线特性完成的。 Warp是SM基本调度单位,实际上,一个Warp是一个32路SIMD指令 。基本单位是half-warp。 如,SM满负载工作有768个线程,则共有768/32=24个warp ,每一瞬时,只有一组warp在SM中执行。 Warp全部线程是执行同一个指令, 每个指令需要4个clock cycle,通过复杂的机制执行。 // v 一个thread的一生: Grid在GPU上启动; block被分配到SM上; SM把线程组织为warp; SM调度执行warp; 执行结束后释放资源; block继续被分配.... 4 线程存储模型 // i Register and local memory:线程私有,对程序员透明。 每个SM中有8192个register,分配给某些block, block内部的thread只能使用分配的寄存器。 线程数多,每个线程使用的寄存器就少了。 // ii shared memory:block内共享,动态分配。 如__shared__ float region[N]。 shared memory 存储器是被划分为16个小单元, 与half-warp长度相同,称为bank,每个bank可以提供自己的地址服务。 连续的32位word映射到连续的bank。 对同一bank的同时访问称为bank conflict。 尽量减少这种情形。 // iii Global memory:没有缓存!容易称为性能瓶颈,是优化的关键! 一个half-warp里面的16个线程对global memory的访问可以被coalesce成整块内存的访问,如果: 数据长度为4,8或16bytes;地址连续;起始地址对齐;第N个线程访问第N个数据。 Coalesce可以大大提升性能。 // uncoalesced Coalesced方法:如果所有线程读取同一地址, 不妨使用constant memory; 如果为不规则读取可以使用texture内存 如果使用了某种结构体,其大小不是4 8 16的倍数, 可以通过__align(X)强制对齐,X=4 8 16
Dec 19, 2023 05:58:05 PM
sdsdsdsdsd
Apr 29, 2024 04:51:58 PM
bae